Back in september 2018 I posted some initial thoughts on what I would like to see to support my electric car ( Electric car features ). I thought it would be useful see we are are against those ideas - partly to see how far we’ve come, but also to put some perspective on what is still pending.
General
Hey its working ! I have data coming from the car and displaying in the cloud console ! So great progress. But …
- Trips are not working ( I know thats pending of course )
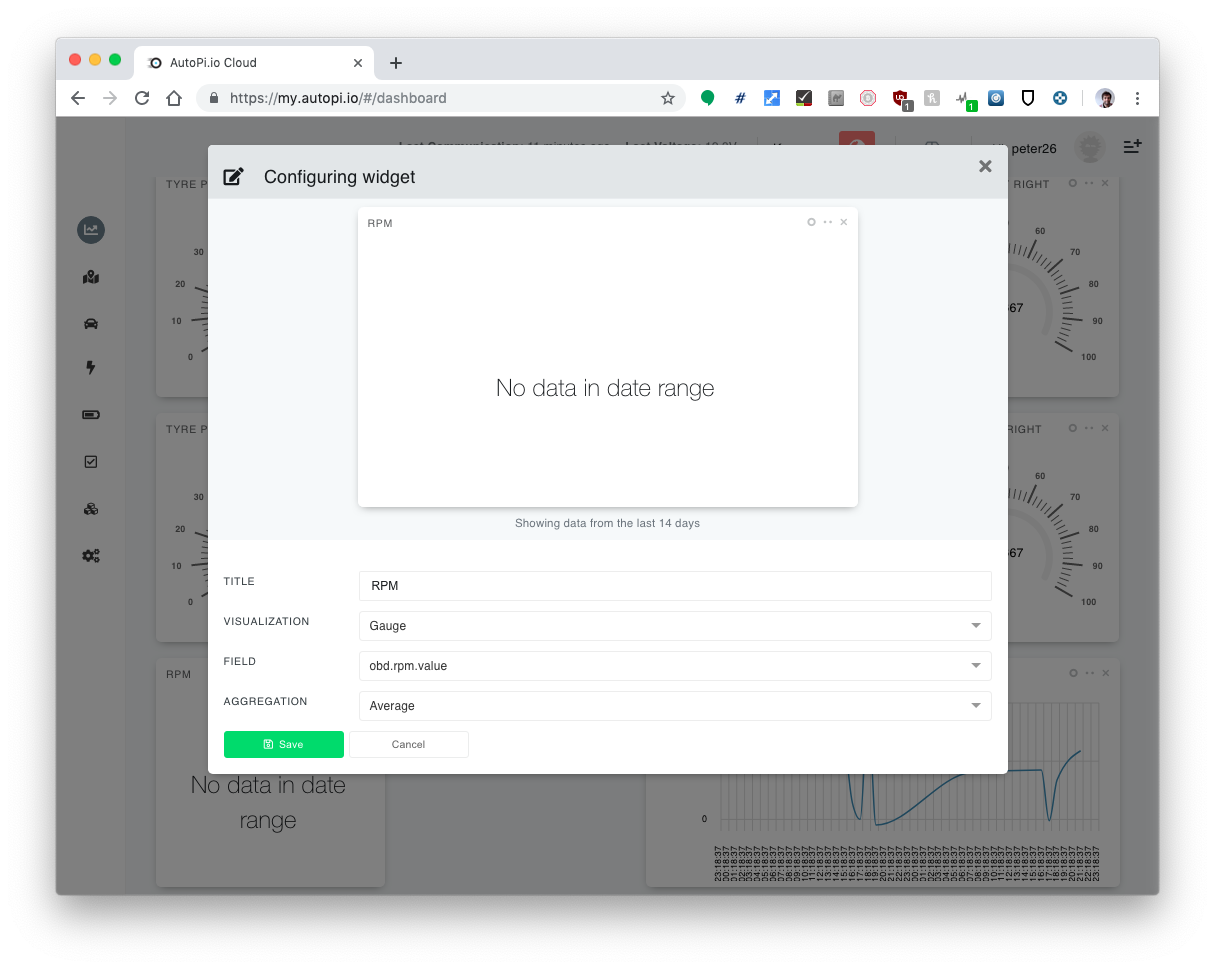
- Its early days for the dash board widgets ( just look to see what you can do on torque pro and others )
- Data is somewhat distorted by averaging ( eg integers become floats ! )
- Can bus recording doesn’t work with my car ( and many others I believe )
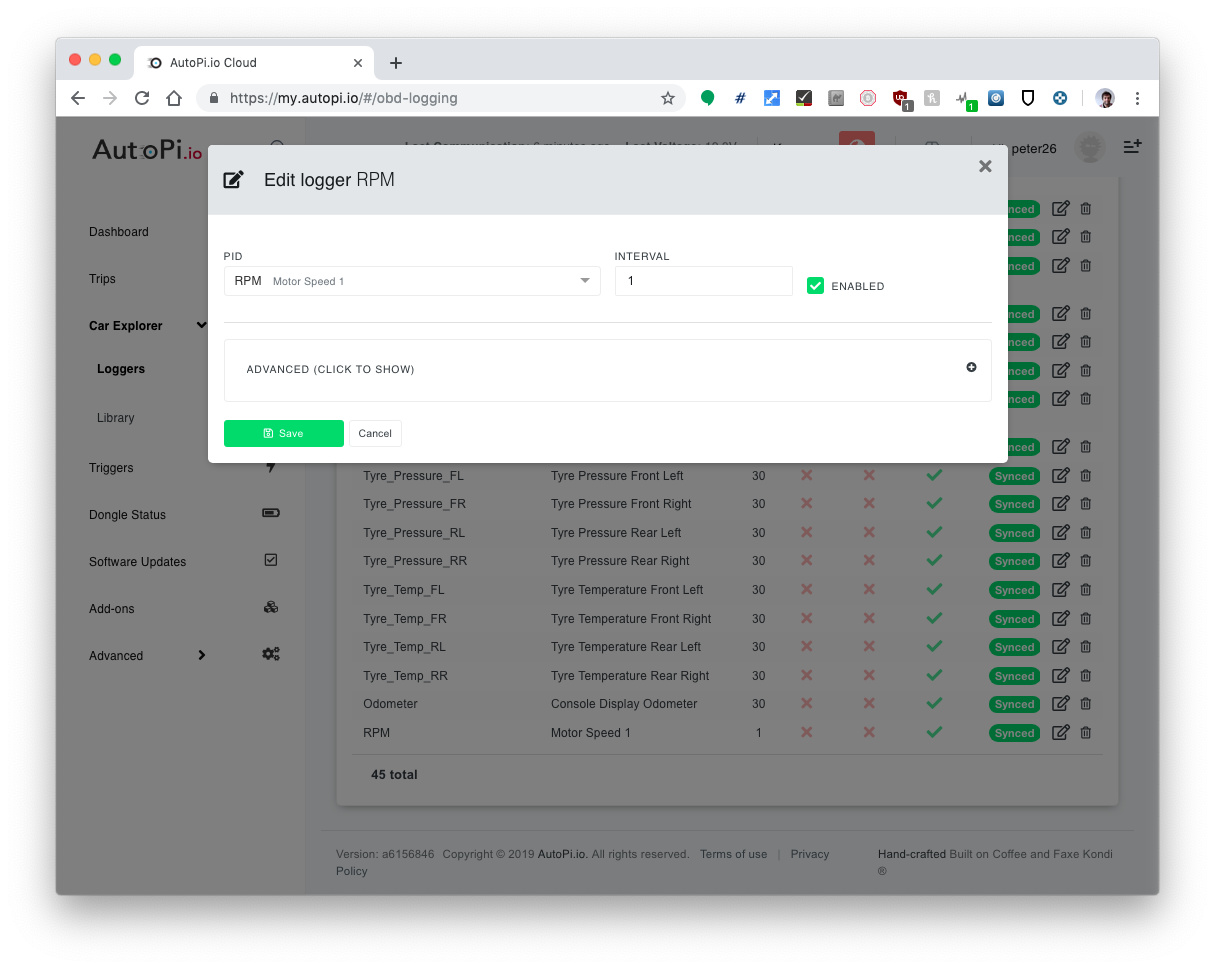
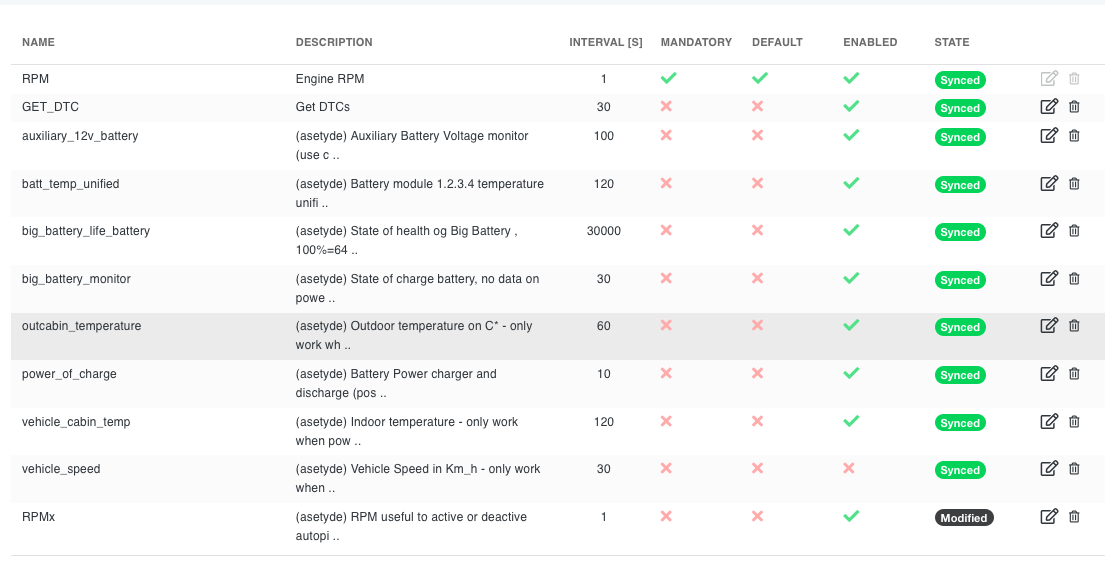
- OBD requests seem to be slow ( about 2 a second ) - maybe we can expose logger data to custom scripts ( to avoid re-requesting ) or, perhaps, move to an async model like OVMS. Scrips are limited to once a minute.
- It can be painful to work with autopi due to its in the car and power quickly runs out. Text console is very slow ( responses in minutes ), issues when functions return 0, not quite the same behaviour between console and scheduled job
Responses to early wish list
Looking back at the earlier post, this is where I am :
- Support a selection of electric car’s ( of course ! )
This is probably the main issue with autopi and similar devices - it depends on manufacturer specific OBD information which they don’t release ( and, yes, I’ve asked ), so we’ll always be trying to reverse engineer the car.
I’ve been wondering if autopi can open up relationships with the manufacturers to see if more information can be found ( after all, info is shared to diagnostic devices ).
Or, failing that, maybe, we need a fast scanning tool with autopi, with associated tools so that data can be gradually understood.
- Support displaying State of Charge (SOC) - battery percentage full
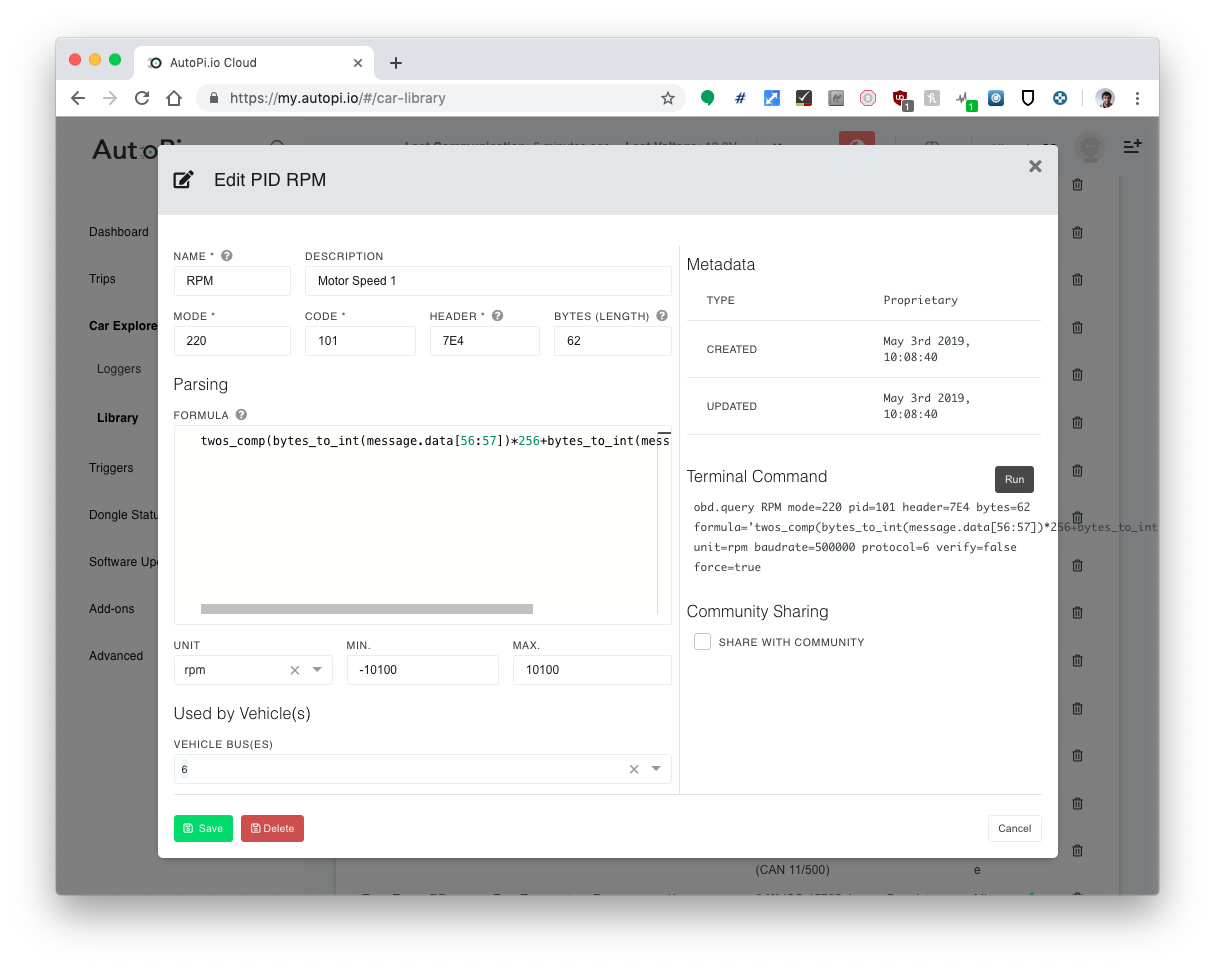
Yep, done ( thanks to the early explorers ar https://github.com/JejuSoul/OBD-PIDs-for-HKMC-EVs )
- Support displaying State of Health (SOH) - percentage of the original battery max capacity
- Especially over time (years) as the car ages
Yep, done. Although we’ve not had the autopi for years yet !
- Detect charging
- Include on map
- Keep track of failed charges
- Alert when charging is finished
Partially done. I don’t believe there is a way to draw chargers on the map. However I did coble together some python code ( Receive charging alerts on your phone ( and smart watch ) ) … but its a shame it can only poll once a minute and not use data already gather by autopi ( so data is always going to be old ).
- Calculate cost of charging
- Based on KW’s charged
- Find cost per KW from location, maybe query on-line database for costs ( eg https://openchargemap.org/site/poi/details/106888 )
- If at home location, take into account home electricity costs, economy 7 etc
- Compare with petrol prices ( for gloat value in the pub
)
Not done.
- Calculate CO2 saved
I am tinkering with this as part of the charging alerts. Not sure yet if the sums are right though !
- Work out steady speed vs range ( https://www.facebook.com/photo.php?fbid=661240720912172&set=gm.256257988327108&type=3&theater ) - include other factors such as temperature
I don’t see a way to even start on this.
One idea is to submit data to a better router planner, ie ABRT ( https://abetterrouteplanner.com/ ), since they seem to be able to do the sums ( eg for teslas see https://forum.abetterrouteplanner.com/blogs/entry/11-range-vs-speed-vs-temperature-from-805-teslas/ ).
With that in mind, I have opened a discussion with the ABRT folks.
- Turn on pre-heating (on cold days)
As far as I know, no-one has discovered how to do this. In any case, we don’t have a graphical way to send commands yet.
- WiFi hotspot support for Hyundai Kona ( to support Tom Tom )
Worked out of the box !
Priorities
So, from my point of view, these are the next steps in priority order -
- Trips for EV
- Improve dashboard
- Add some tools to scan OBD and process the results ( or, get more info from the manufacturers ! )
- Consider ways to speed up requests ( especially from custom code ), look at async calls and integration of the logger with custom scripts
- See if there is a better way to test scripts
Summary
I suppose a post like this was always going to feel a bit negative, but thats not my intent. A lot is working and autopi is now fully installed in my car. So many thanks to the autopi folks for the progress so far … pretty awesome  Many thanks for the product and the support offered here. Much appreciated.
Many thanks for the product and the support offered here. Much appreciated.