Added settings view with access to various device configuration parameters for advanced users.
Added OBD readouts configuration page that specifies which values to retrieve from the car.
Added first version of the CAN analyzer GUI (Guides will follow).
Fixed validation issues in jobs editor.
Fixed invalid date issue in trips list.
AutoPi Core
Improved cloud upload from Redis cache to support better retry.
Added support for WiFi only dongles.
Fixed issue with SPM heartbeat communication on RPi3 that resulted in reboots.
Fixed initial SPM query failed when protocol not fully initialized.
Fixed command ‘obd.query’ failed when defining custom ‘mode’ and ‘pid’ parameters.
NB, auto updates are currently disabled, but will be enabled again soon.
Currently the update takes quite a while to finish, and it will restart the services running on the device. So please be patient when installing the updates, it should finish by itself, or retry on errors.
Let us know if you experience any issues.
Since I currently cant get the RPI3 to work with OBD, I reverted back to RPI Zero.
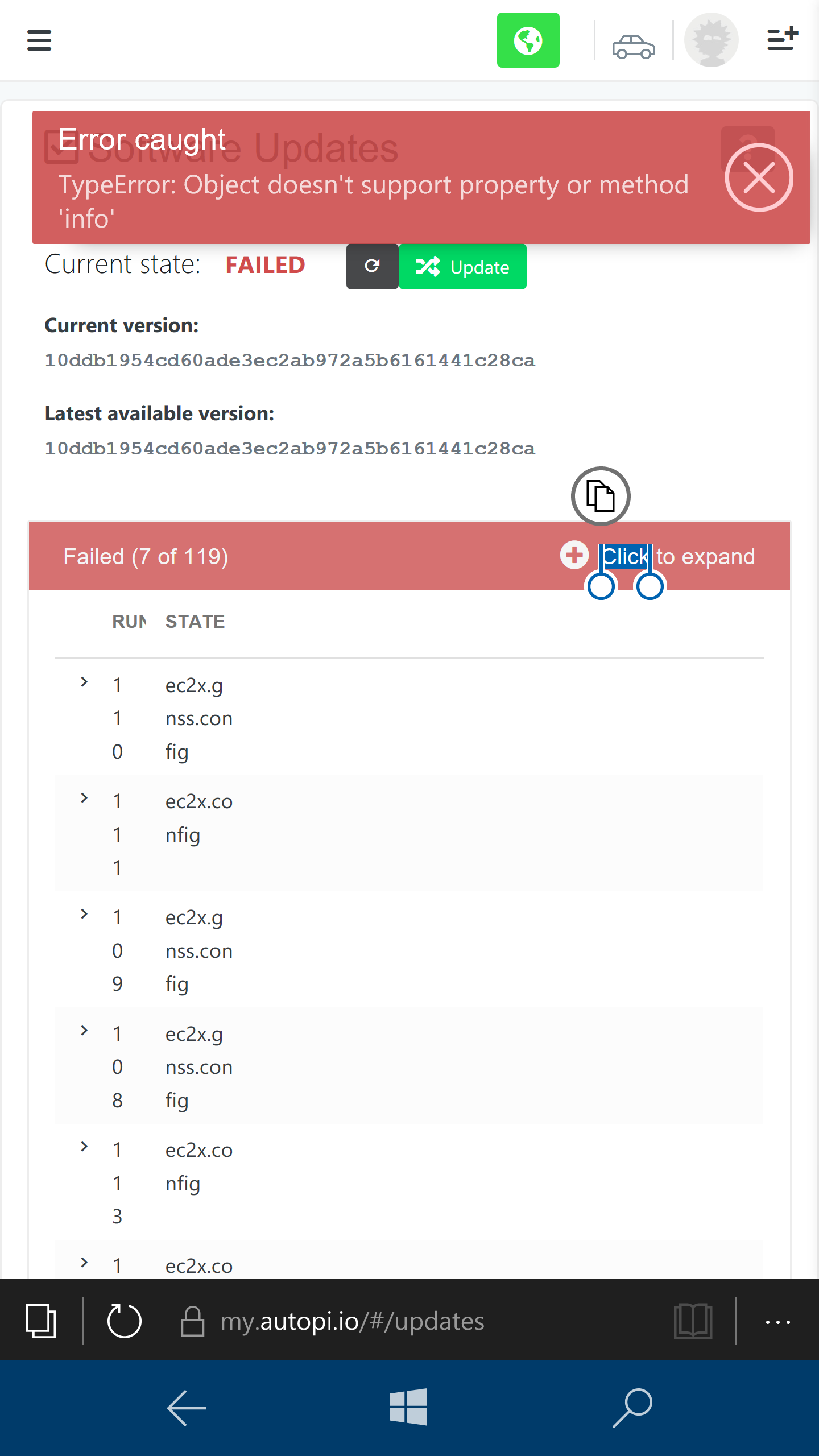
Updating to the latest version here, throws an error:
I do get OBD data now but I cant get OBD to work on the RPI3 yet. But I will wait for the OBD power cable I ordered from you guys until I retry the RPI3 setup again.
In regards to this update error, it does not seem to have a to big affect on the overall functionality.
Before update dongle take 20 minutes to find OBD, after update I waiting 30 minutes engine running without sound.
Dongle was on and I logged in on local, but all commands timeout.
I get bored on waiting and start using torque app again
I have fixed the issue that you are seeing, when fixed you should instead see a message that the update finished, but some states was not applied correctly. But when this happens, it should retry the update behind the scenes, so it should fix itself.
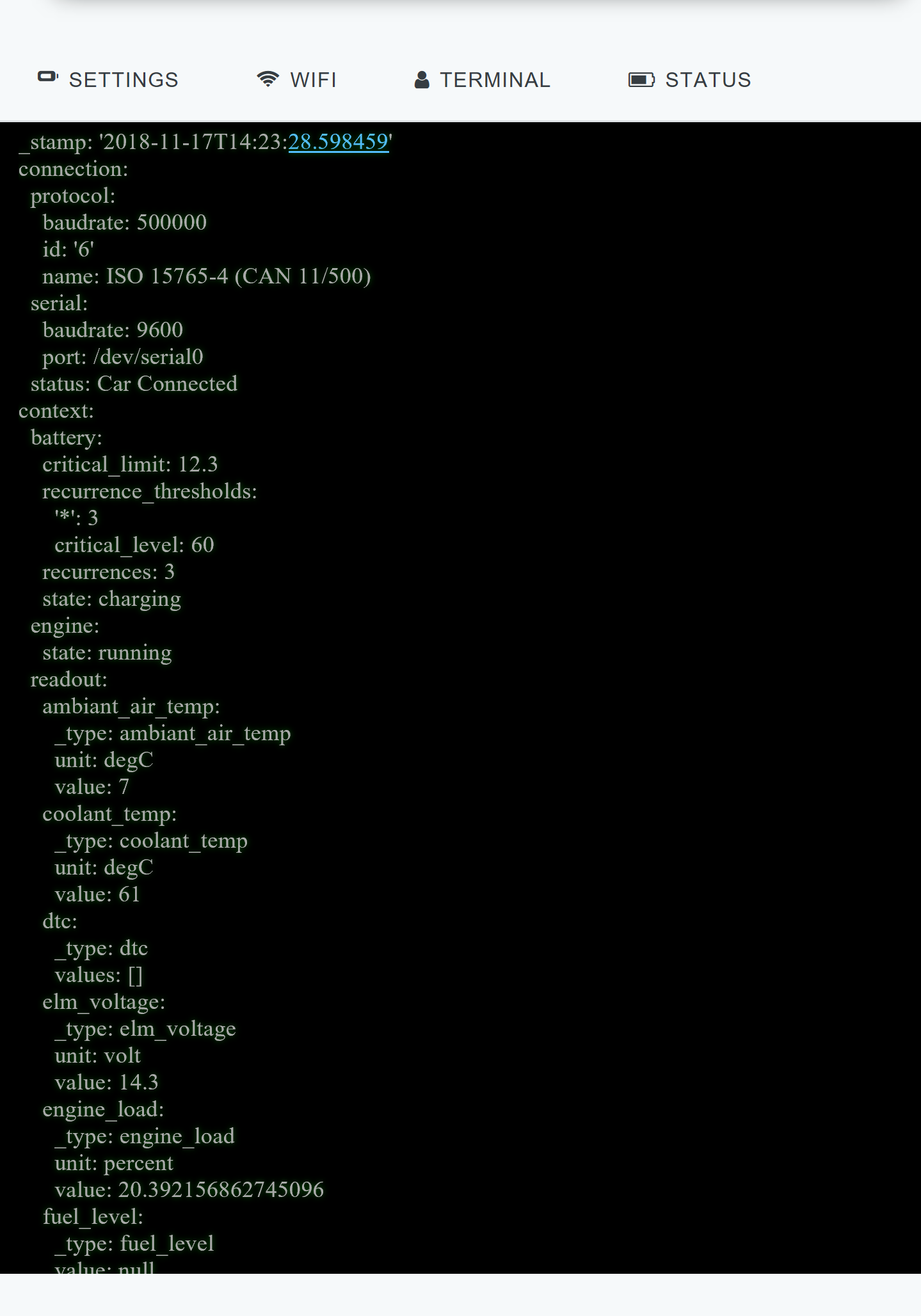
It looks like the states that didn’t succeed are modem related - is the modem recognized if you do lsubsb when connected via ssh or cmd.run ‘lsusb’ in the local terminal?
Is there any information available yet about how the ODB logger works ? I understand there is more work yet to be done to actually use this data on the cloud, but sometime soon I would like to start exploring this.
We don’t have any documentation for the decoder yet, but I can tell you how the field works.
The decoder field specifies which decoder to use from a list of default decoders - I looked through to see if i could find one that works for the response you get from your ioniq - but take a look and see if anything may work
I think we need to make it dynamic so that you can input the formula yourself, so that you don’t depend on a list of specific decoders that may or may not match the formula you need.
And the spelling error will be fixed - it should, as you correctly guessed, say ‘decoder’
Does the GPS work as well?
I can take a look at the logs regarding the states that return errors, if you have the logs and the specific time that you ran the update?