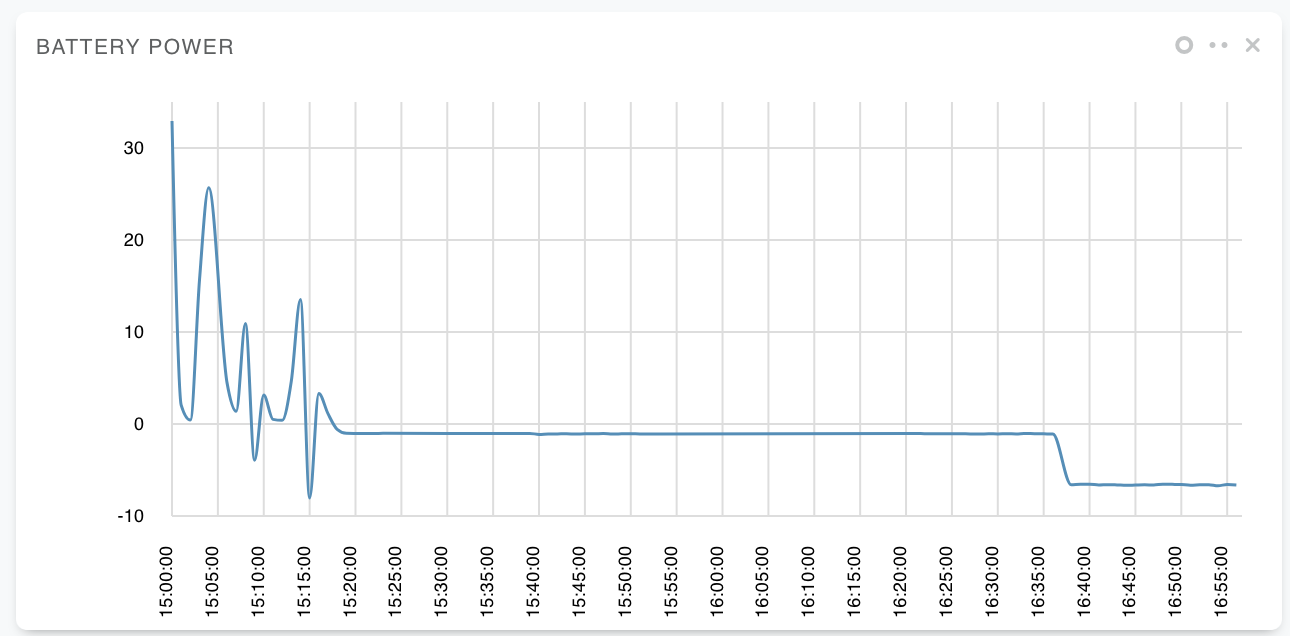
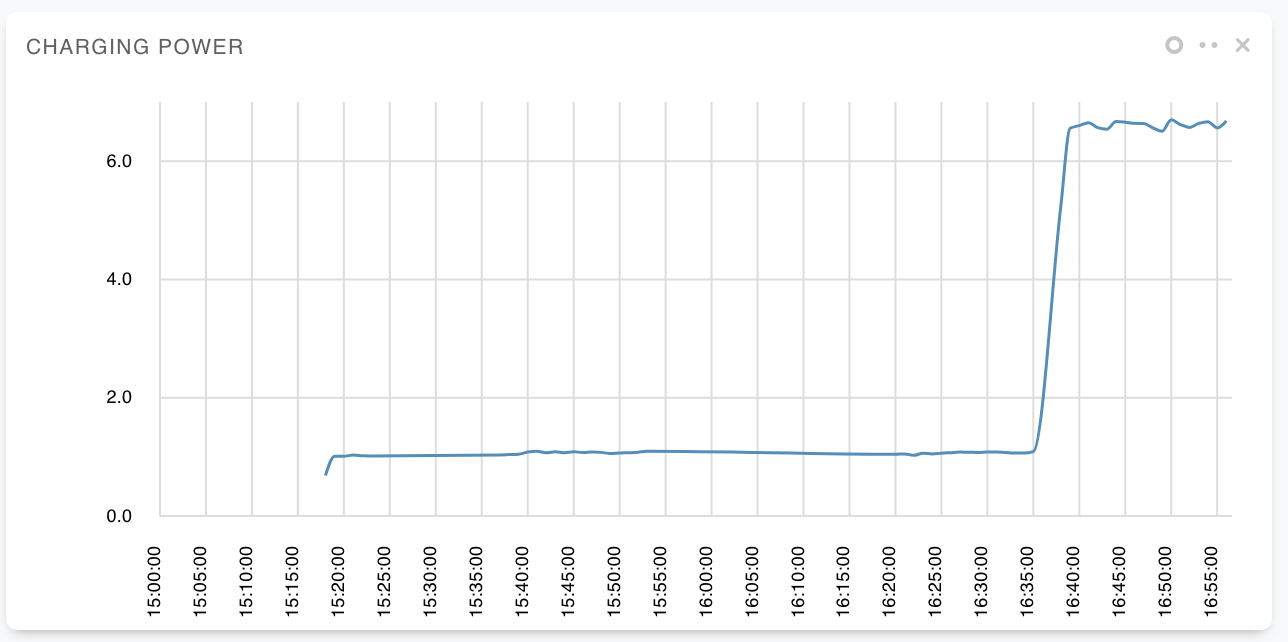
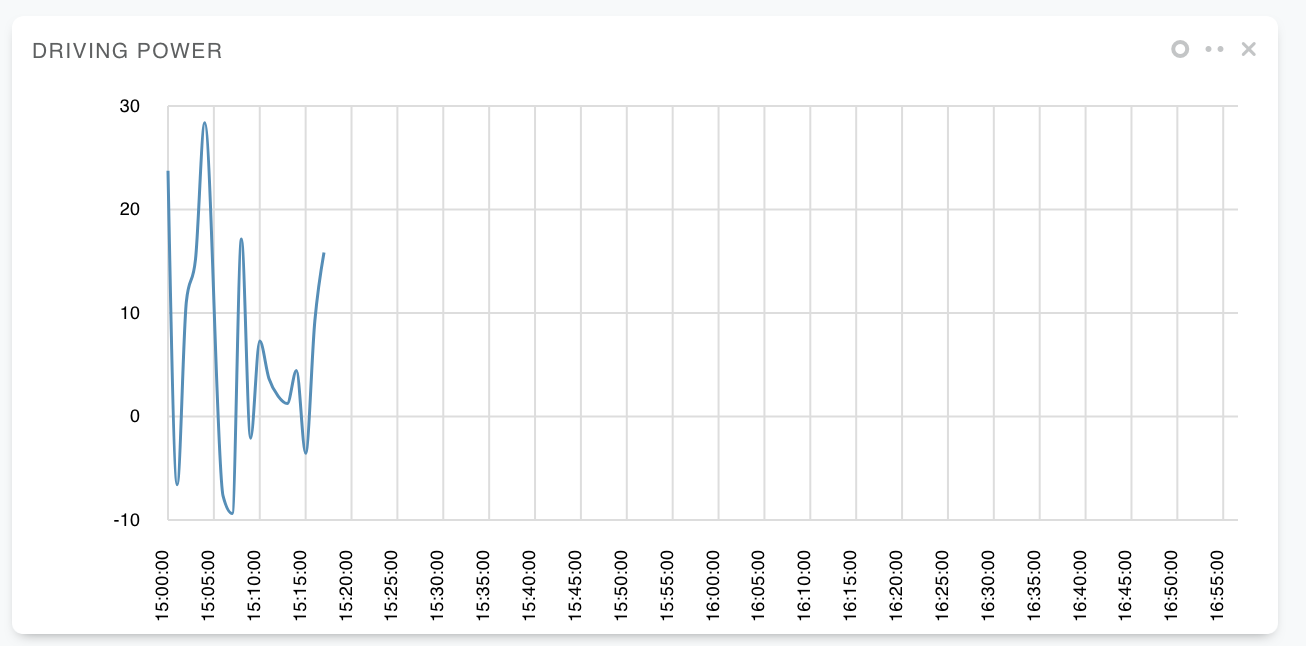
I’ve just taken a drive then a charge. I see the raw battery power is -
So up to around 15:18 or so I was driving, after that a trickle charge at around 1kW before up to 7kW ( I’ve got a zappi charger and it seems to work that way ).
Hi
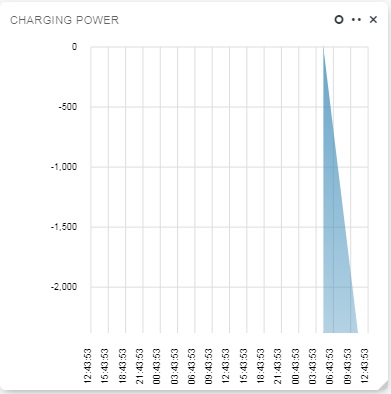
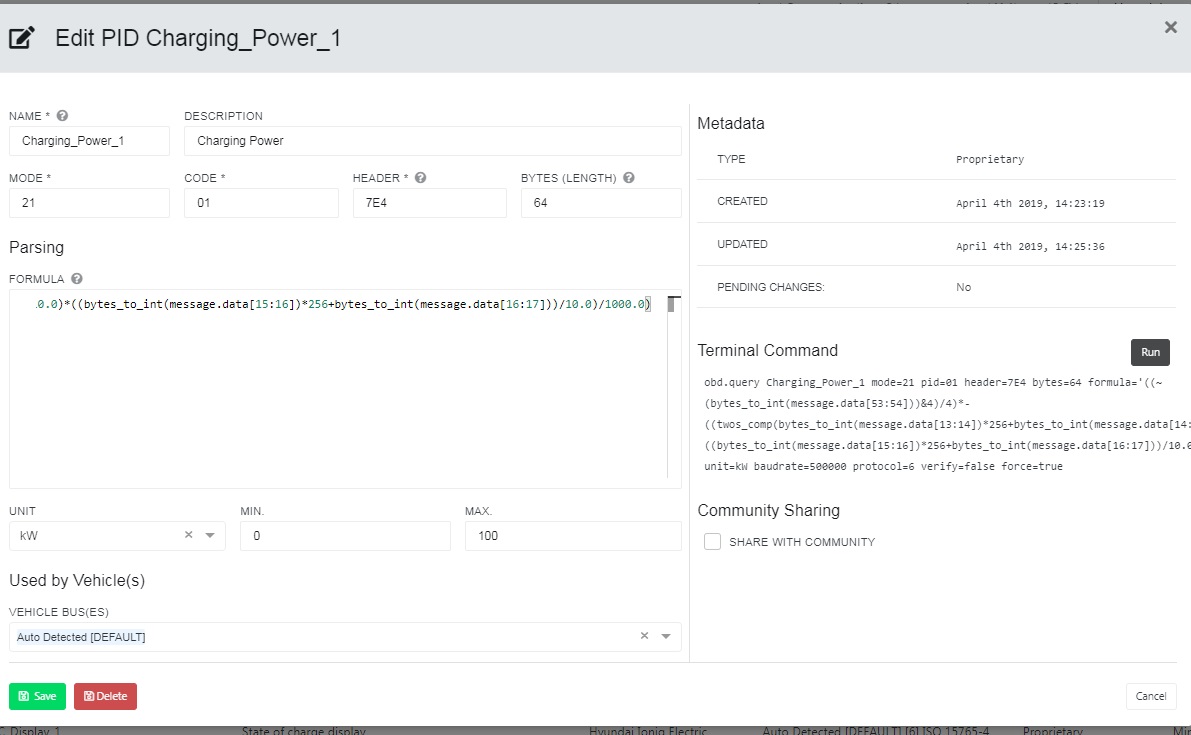
I am not good at programing so i am try to use the Hyundai Kona PID that is in the community to my Ioniq electric
Now i am try to se the charge power and i get some data . But it is in wrong value ( se pictures)
Because it is so many good people here i hope to get some help
Did i forget / miss something (entirely possible, i’m so sleep deprived lately i’m as good as senile), or shouldn’t the main battery SOC PID be a usable indicator of car being on/off?
When the car is off, and not charging, the BMC is offline, and isn’t reporting the SOC. So as long as the car is charging or turned on, the PID will respond, and if using that, autopi will stay on.
Even in this state your assumption is correct hehe
The thing is however, that the AutoPi team needs to change the core functionality of how to make AutoPi stay on. Currently they rely on engine rpm. If they manage to change it to custom, then we can literally use any PID for this
At least that’s how I understand the situation. I may be wrong though, just woke up and kind of looking with one eye writing this
Just want to add in on the discussion. We do read all your message and have not forgot about this. We are working on this as a top priority at the moment.
We hope to be able to release this in the next release.
That won’t work, that RPM PID doesn’t work when the car is on, it only works when the car is in D/R gear, at least that’s the way it seemed to work on mine. It appears to go away as soon as you shift to P or N.
Well technically it does work. If you don’t get back a reply, that’s not even 0 rpm, it’s NaN/null/error or whatever.
In reality, as long as we get something back from the car (even if it’s 0 rpm), we can assume it’s ON. When we stop getting replies, The AutoPi can go back to bed
That’s the thing, last time i tried this (using Torque), i was getting no reply for that PID (RPM1 or RPM2) unless in D or R. Might’ve botched something though, will retry that.

 But I don’t think the formula is correct when it gives a result of -0.815?!
But I don’t think the formula is correct when it gives a result of -0.815?!