Hej Mats.
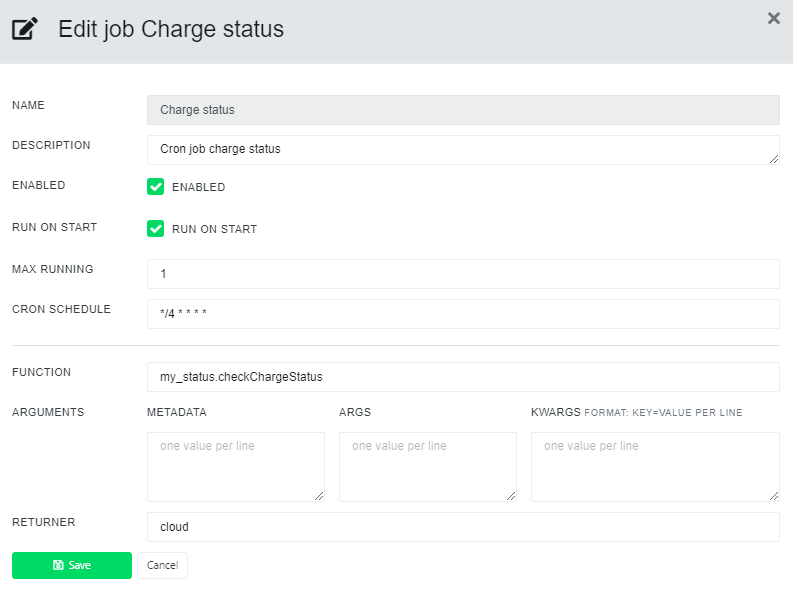
Here is the code for the charging.
I just added the GOM range, but I cannot get the air temp, so I am using battery temp, I think it works ok, but not when the battery is warm from driving, the range is to long. I will try to get the air temp a bit more but if i cannot I will change that to a fixed value when the temp is above something like 22 degrees (then keep 22 when warmer), to be decided.
import logging
import requests
import pickle
import os
from enum import Enum
log = logging.getLogger(__name__)
# Telegram tokens - see https://www.mariansauter.de/2018/01/send-telegram-notifications-to-your-mobile-from-python-opensesame/
#
BOT_TOKEN = '888888888888888888xxxxxxxxxxxxxxxxxxx888888888888888'
BOT_CHATID = '888888888'
def checkChargeStatus():
# load previous status
#
persistance = load()
# check if we are driving or charging
#
charging = get_charging()
if charging == 0 or charging == -1:
if persistance['charging'] == True:
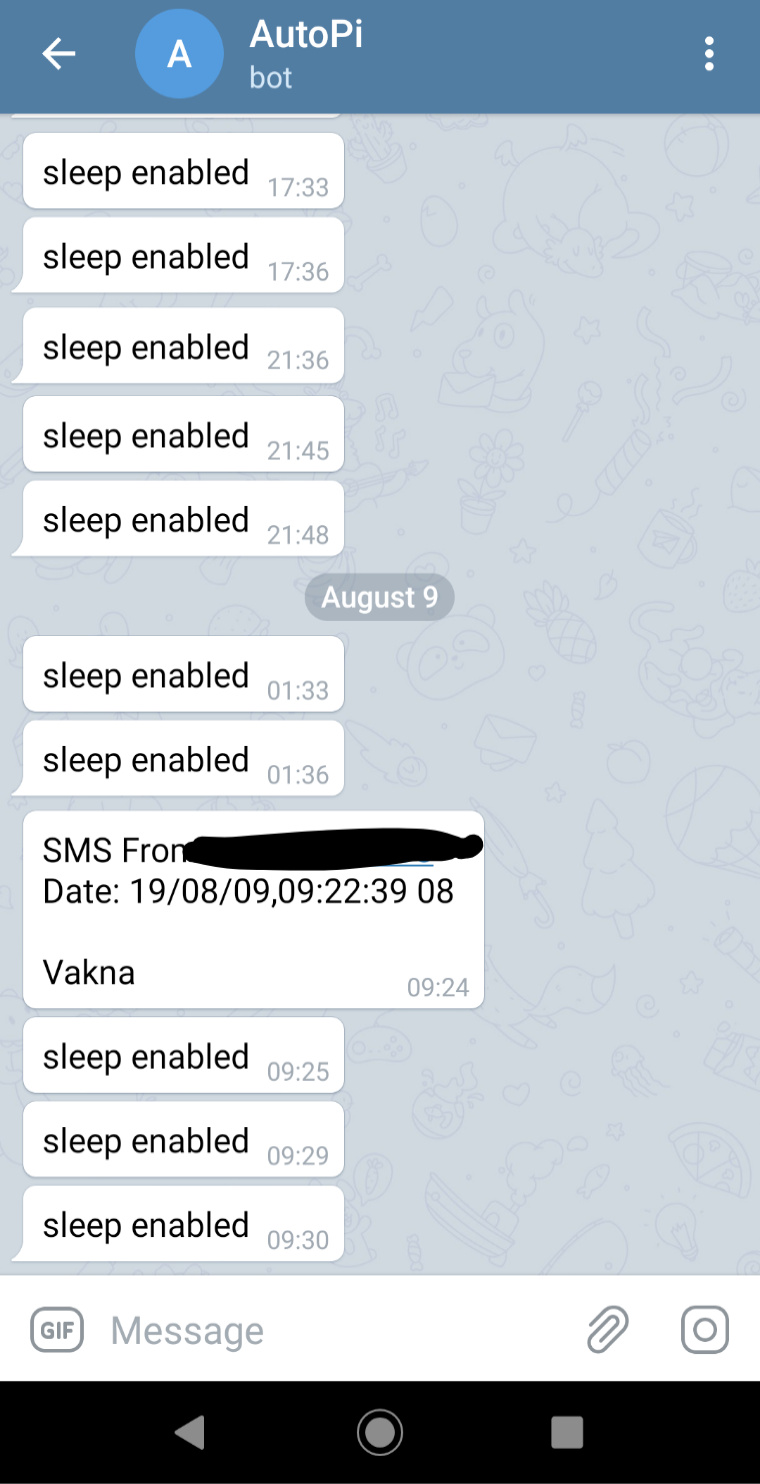
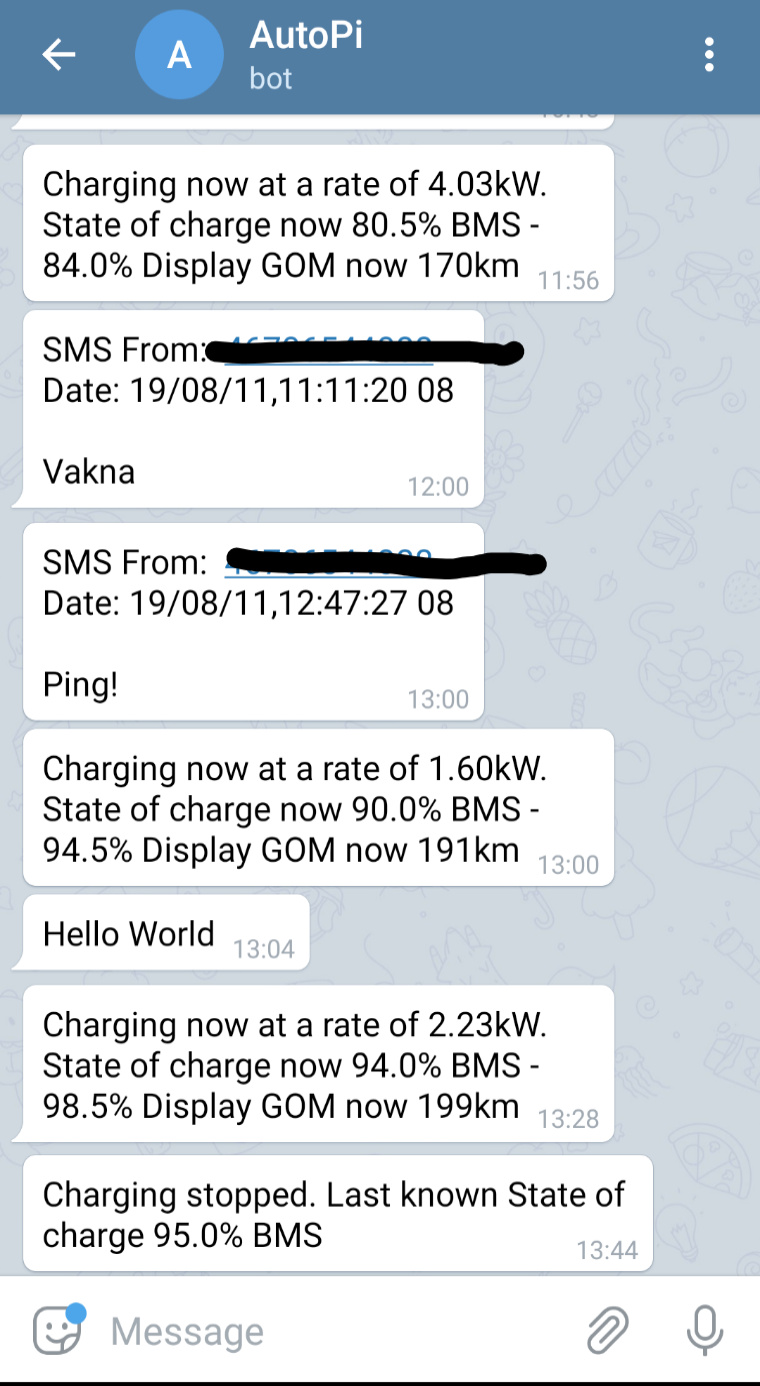
bot_sendtext("Charging stopped. Last known State of charge "+format(persistance['SOC'],'.1f')+"% BMS")
#bot_sendtext("Charging stopped. Last known State of charge "+format(persistance['SOC'],'.1f')+"% BMS - "+format(soc_display,'.1f')+ "% Display")
persistance['charging'] = False
save(persistance)
return {"msg": "Not charging"} # Does nothing ?
chargingPower = get_charging_power()
soc = get_soc()
soc_display = get_soc_display()
temp = get_temp()
# alert if just started to charge
#
if persistance['charging'] == False:
bot_sendtext("Charging started at a rate of "+format(2*chargingPower,'.2f')+"kW. State of charge now "+format(soc,'.1f')+"% BMS - "+format(soc_display,'.1f')+ "% Display GOM now "+format(0.01*soc_display*2800/(16.08813 + (temp*(-0.13873))),'.0f')+"km")
# 40% alert
#
if soc >= 40 and persistance['SOC'] < 40:
bot_sendtext("Charging now at a rate of "+format(2*chargingPower,'.2f')+"kW. State of charge now "+format(soc,'.1f')+"% BMS - "+format(soc_display,'.1f')+ "% Display GOM now "+format(0.01*soc_display*2800/(16.08813 + (temp*(-0.13873))),'.0f')+"km")
# 50% alert
#
if soc >= 50 and persistance['SOC'] < 50:
bot_sendtext("Charging now at a rate of "+format(2*chargingPower,'.2f')+"kW. State of charge now "+format(soc,'.1f')+"% BMS - "+format(soc_display,'.1f')+ "% Display GOM now "+format(0.01*soc_display*2800/(16.08813 + (temp*(-0.13873))),'.0f')+"km")
# 60% alert
#
if soc >= 60 and persistance['SOC'] < 60:
bot_sendtext("Charging now at a rate of "+format(2*chargingPower,'.2f')+"kW. State of charge now "+format(soc,'.1f')+"% BMS - "+format(soc_display,'.1f')+ "% Display GOM now "+format(0.01*soc_display*2800/(16.08813 + (temp*(-0.13873))),'.0f')+"km")
# 70% alert
#
if soc >= 70 and persistance['SOC'] < 70:
bot_sendtext("Charging now at a rate of "+format(2*chargingPower,'.2f')+"kW. State of charge now "+format(soc,'.1f')+"% BMS - "+format(soc_display,'.1f')+ "% Display GOM now "+format(0.01*soc_display*2800/(16.08813 + (temp*(-0.13873))),'.0f')+"km")
# 80% alert
#
if soc >= 80 and persistance['SOC'] < 80:
bot_sendtext("Charging now at a rate of "+format(2*chargingPower,'.2f')+"kW. State of charge now "+format(soc,'.1f')+"% BMS - "+format(soc_display,'.1f')+ "% Display GOM now "+format(0.01*soc_display*2800/(16.08813 + (temp*(-0.13873))),'.0f')+"km")
# 90% alert
#
if soc >= 90 and persistance['SOC'] < 90:
bot_sendtext("Charging now at a rate of "+format(2*chargingPower,'.2f')+"kW. State of charge now "+format(soc,'.1f')+"% BMS - "+format(soc_display,'.1f')+ "% Display GOM now "+format(0.01*soc_display*2800/(16.08813 + (temp*(-0.13873))),'.0f')+"km")
# 100% alert ... not sure if this can really happen
#
if soc >= 94 and persistance['SOC'] < 94:
bot_sendtext("Charging now at a rate of "+format(2*chargingPower,'.2f')+"kW. State of charge now "+format(soc,'.1f')+"% BMS - "+format(soc_display,'.1f')+ "% Display GOM now "+format(0.01*soc_display*2800/(16.08813 + (temp*(-0.13873))),'.0f')+"km")
# store status for next time
#
persistance['charging'] = True
persistance['SOC'] = soc
save(persistance)
#return {"msg": "Charging at "+format(chargingPower,'.2f')+"kW, SOC now "+format(soc,'.1f')+"% "+format(temp,'.1f')+" temp"}
#return {"msg": "Charging at "+format(chargingPower,'.2f')+"kW, SOC now "+format(soc,'.1f')+"% "+format(0.01*soc*2800/(16.08813 + (temp*(-0.13873))),'.1f')+" km"}
return {"msg": "Charging at "+format(chargingPower,'.2f')+"kW, SOC (BMS) now "+format(soc,'.1f')+"% GOM now "+format(0.01*soc_display*2800/(16.08813 + (temp*(-0.13873))),'.0f')+"km"}
# send message to telegram
#
def bot_sendtext(message):
send_text = 'https://api.telegram.org/bot' + BOT_TOKEN + '/sendMessage?chat_id=' + BOT_CHATID + '&parse_mode=Markdown&text=' + message
requests.get(send_text)
# load persistance
#
def load():
try:
persistance = pickle.load( open( 'charge_status.p', 'rb' ) )
except:
persistance = { 'charging': False, 'SOC': 0 }
return persistance
# save persistance
#
def save(persistance):
pickle.dump( persistance, open( "charge_status.p", "wb" ) )
# delete persistance
#
def delete():
os.remove("charge_status.p")
# OBD Queries -----------------------------------------------------------------------------
# get Battery Temprature
#
def get_temp():
args = ['temp']
kwargs = {
'mode': '21',
'pid': '01',
'header': '7E4',
'baudrate': 500000,
'formula': 'twos_comp(bytes_to_int(message.data[17:18]),8)',
'protocol': '6',
'verify': False,
'force': True,
}
return __salt__['obd.query'](*args, **kwargs)['value']
def get_charging_power():
args = ['charging_power']
kwargs = {
'mode': '21',
'pid': '01',
'header': '7E4',
'baudrate': 500000,
#'formula': '(twos_comp(bytes_to_int(message.data[13:14])*256+bytes_to_int(message.data[14:15]),16)/10.0)*((bytes_to_int(message.data[15:16])+bytes_to_int(message.data[16:17]))/10.0)/1000.0',
'formula': '(twos_comp(bytes_to_int(message.data[12:13])*256+bytes_to_int(message.data[13:14]),16)/10.0)*((bytes_to_int(message.data[14:15])+bytes_to_int(message.data[15:16]))/10.0)/100.0',
'protocol': '6',
'verify': False,
'force': True,
}
return __salt__['obd.query'](*args, **kwargs)['value']*-1.0
# get BMS state of charge
#
def get_soc():
args = ['soc']
kwargs = {
'mode': '21',
'pid': '01',
'header': '7E4',
'baudrate': 500000,
'formula': 'bytes_to_int(message.data[6:7])',
'protocol': '6',
'verify': False,
'force': True,
}
return __salt__['obd.query'](*args, **kwargs)['value']/2.0
# get display state of charge
#
def get_soc_display():
try:
args = ['soc']
kwargs = {
'mode': '21',
'pid': '05',
'header': '7E4',
'baudrate': 500000,
'formula': 'bytes_to_int(message.data[33:34])',
'protocol': '6',
'verify': False,
'force': True,
}
return __salt__['obd.query'](*args, **kwargs)['value']/2.0
except:
return -1
## LOCATION
#
def get_location():
args = []
kwargs = {}
return __salt__['ec2x.gnss_nmea_gga'](*args, **kwargs)
# Retuns exception
def get_carState():
# try:
args = ['driving']
kwargs = {
'mode': '21',
'pid': '01',
'header': '7E4',
'baudrate': 500000,
'formula': 'bytes_to_int(message.data[53:54])', # Ignition
'protocol': '6',
'verify': False,
'force': True,
}
return (int(__salt__['obd.query'](*args, **kwargs)['value'])&4)/4
def get_charging():
try:
args = ['driving']
kwargs = {
'mode': '21',
'pid': '01',
'header': '7E4',
'baudrate': 500000,
'formula': 'bytes_to_int(message.data[11:12])',
'protocol': '6',
'verify': False,
'force': True,
}
return (int(__salt__['obd.query'](*args, **kwargs)['value'])&128)/128
except:
return -1
# Weird response, always seem to be true
def get_charging_chademo():
# try:
args = ['CCS Plug']
kwargs = {
'mode': '21',
'pid': '01',
'header': '7E4',
'baudrate': 500000,
'formula': 'bytes_to_int(message.data[12:13])',
'protocol': '6',
'verify': False,
'force': True,
}
return (int(__salt__['obd.query'](*args, **kwargs)['value'])&64)/64
# Weird response, always seem to be true
def get_charging_normal():
# try:
args = ['J1772 Plug']
kwargs = {
'mode': '21',
'pid': '01',
'header': '7E4',
'baudrate': 500000,
'formula': 'bytes_to_int(message.data[12:13])',
'protocol': '6',
'verify': False,
'force': True,
}
return (int(__salt__['obd.query'](*args, **kwargs)['value'])&32)/32