Wow, what a great project! It might be exactly what I am looking for, but perhaps not. Hope to find out soon.
I am in the process of converting my 1967 Volvo Amazon wagon to full electric.
It does not have OBD2 of course, but I will be implementing CAN-BUS for example for the battery management system. My questions are:
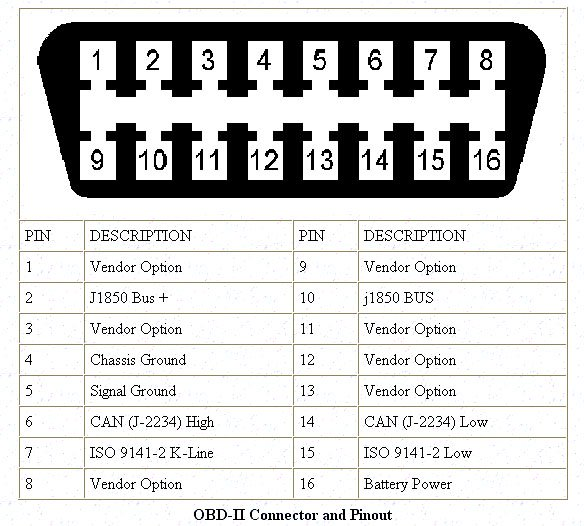
Can I just add a female OBD2 connector to my wiring loom, connect CAN H to pin 6, CAN L to pin 14, car battery (13,5V) to pin 16 and ground to pin 4 and be able to use the AutoPi?
How can I read and use “raw” CAN messages from the bus? My car will probably not have any of the standard/default PID’s like the OEM cars have. For example, the state of charge, amperes out, regen amps, temperatures, etc will be on the CAN-BUS with known ID’s. Can I visualise those in widgets?
What CAN bus protocols to you support? CAN 2.0 A/B? And what speeds?
Can I also use AutoPi to send CAN Messages under certain conditions to trigger events? (eg I intend to have an Arduino for PWM outputs perhaps controlled by CAN).
And can I set the HDMI resolution output in a config? My screen is 800x480 and does not have a scaler.
Sure, it will be possible to customize your widgets and the data in the widgets, and thereby giving you freedom of what you want to visualize.
The list of supported protocols can be seen in here at the bottom of the page. The AutoPi support CAN at any speed available in vehicles.
Sure, this will be part of our trigger system, where you can trigger subsystems on the device or in the cloud.
The HDMI comes from the Raspberry Pi Zero (or RPi3). This means the limits is in this device. You can scale the resolution in the OS using raspi-config or similar.
Thanks @Peter that sounds very promising. I’ll look into the supported protocols. I’m not familiar with ISO’s mentioned there but I assume they somehow translate into CAN 2.0 A/B. I trust it will work out since CAN 2.0 A/B is very common if I’m correct.
Anyhow I will closely follow the AutoPi developments and if compatible with what I’m building consider it as an option for my project.
Did some more research on CAN compatibility to try to ensure AutoPi works in my project before finalising my order.
In the list of supported protocol ISO 11898 (RAW) is mentioned.
Building on for example the information in this presentation my conclusion is that AutoPi will work with my CAN network using CAN 2.0 A/B messages.
Can anyone confirm that?
Can AutoPi also be used to create/send CAN messages onto the bus? Or is it reporting only?
I noticed you never received a reply to this. Sorry for that. Seems like some interesting slides. RAW can is supported, and I believe you will be able to use the AutoPi for your project.
And just to confirm. The AutoPi will also be able to send message on to the bus. So its both ways, which opens up some real interesting possibilities.
Thanks, sounds very good!
However, in the meantime another solution has emerged for my project that currently is my number one option. This is an “Advanced Display Unit” from ECUmaster
The reasons for this preference are:
It’s very robust (comes from autosport scene)
There is software included to create a fully custom GUI using drag and drop elements
I’ll certainly closely continue to follow AutoPi as well.