Here is a first stab at getting data uploaded to a better route planner ( https://abetterrouteplanner.com/ ). You will need a couple of things -
-
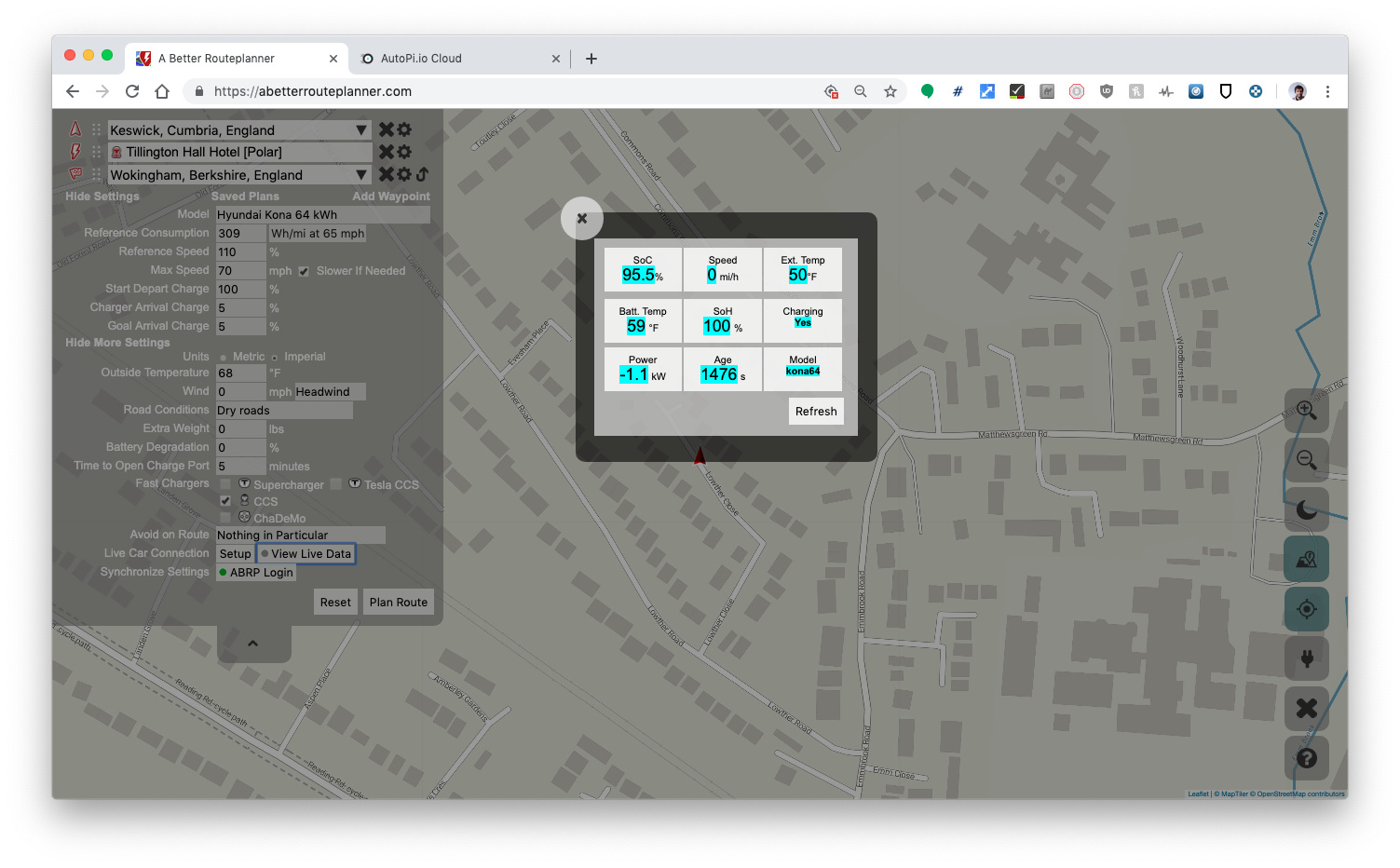
Your token or email address - this is found on the https://abetterrouteplanner.com/ after you have logged in -
Show Settings
Show More Settings
Live Car Connection Setup
Next until User Email Address is shown - copy that here -
API token - can be obtained from contact@iternio.com, but I’m hoping we can share the same one
Custom code script is -
import time
import logging
import requests
import json
import urllib
log = logging.getLogger(__name__)
# ABRP token ( ie email address )
#
# See https://abetterrouteplanner.com/
# Show Settings
# Show More Settings
# Live Car Connection Setup
# Next until User Email Address is shown - copy that here
#
abrt_token = 'some value'
# ABRP API KEY
#
# See contact@iternio.com
#
abrt_apikey = 'some value'
def telemetry():
"""
Report telemetry to ABRP
"""
data = {}
location = get_location()
# Required
# utc - Current UTC timestamp in seconds
data['utc'] = time.time()
log.info ('utc = '+str(data['utc']))
# soc - State of Charge of the battery in percent (100 = fully charged battery)
data['soc'] = get_soc()
log.info ('soc = '+str(data['soc']))
# speed - Speed of the car in km/h (GPS or OBD)
data['speed'] = get_speed()
log.info ('speed = '+str(data['speed']))
# lat - User's current latitude
data['lat'] = location['latitude']
log.info ('lat = '+str(data['lat']))
# lon - User's current longitude
data['lon'] = location['longitude']
log.info ('lon = '+str(data['lon']))
# is_charging - 1 or 0, 1 = charging, 0 = driving
data['is_charging'] = get_charging()
log.info ('is_charging = '+str(data['is_charging']))
# car_model - String like:chevy:bolt:17:60:other determining what car the user has connected
data['car_model'] = 'hyundai:kona:17:64:other'
# optional
# voltage - Voltage of the battery in Volts
data['voltage'] = get_voltage()
log.info ('voltage = '+str(data['voltage']))
# current - Current output (input is negative) of the battery in Amps
data['current'] = get_current()
log.info ('current = '+str(data['current']))
# power - Power output (input is negative) of the battery in kW
data['power'] = data['current']*data['voltage']/1000.0
log.info ('power = '+str(data['power']))
# soh - State of Health of the battery in percent (100 = fully healthy battery)
data['soh'] = get_soh()
log.info ('soh = '+str(data['soh']))
# elevation - User's current elevation in meters
data['elevation'] = location['altitude']
log.info ('elevation = '+str(data['elevation']))
# ext_temp - External temperature in Celsius
data['ext_temp'] = get_externaltemp()
log.info ('ext_temp = '+str(data['ext_temp']))
# batt_temp - Battery temperature in Celsius
data['batt_temp'] = get_batterytemp()
log.info ('batt_temp = '+str(data['batt_temp']))
params = {'token': abrt_token, 'api_key': abrt_apikey, 'tlm': json.dumps(data, separators=(',',':'))}
log.info ('https://api.iternio.com/1/tlm/send?'+urllib.urlencode(params))
return {"msg": requests.get('https://api.iternio.com/1/tlm/send?'+urllib.urlencode(params))}
# get display state of charge
#
def get_soc():
args = ['soc']
kwargs = {
'mode': '220',
'pid': '105',
'header': '7E4',
'baudrate': 500000,
'formula': 'bytes_to_int(message.data[34:35])/2.0',
'protocol': '6',
'verify': False,
'force': True,
}
return __salt__['obd.query'](*args, **kwargs)['value']
# get speed ( needs validation )
#
def get_speed():
try:
args = ['speed']
kwargs = {
'mode': '220',
'pid': '100',
'header': '7B3',
'baudrate': 500000,
'formula': 'bytes_to_int(message.data[32:33])',
'protocol': '6',
'verify': False,
'force': True,
}
return __salt__['obd.query'](*args, **kwargs)['value']
except:
return 0
# is charging
#
def get_charging():
try:
args = ['charging']
kwargs = {
'mode': '220',
'pid': '101',
'header': '7E4',
'baudrate': 500000,
'formula': 'bytes_to_int(message.data[53:54])',
'protocol': '6',
'verify': False,
'force': True,
}
# note - sums are done outside of the forumla due to autopi failing
# with 0
#
return 1-(int(__salt__['obd.query'](*args, **kwargs)['value'])&4)/4
except:
return 0
# get voltage
#
def get_voltage():
args = ['voltage']
kwargs = {
'mode': '220',
'pid': '101',
'header': '7E4',
'baudrate': 500000,
'formula': '(bytes_to_int(message.data[15:16])*256+bytes_to_int(message.data[16:17]))/10.0',
'protocol': '6',
'verify': False,
'force': True,
}
return __salt__['obd.query'](*args, **kwargs)['value']
# get current
#
def get_current():
args = ['current']
kwargs = {
'mode': '220',
'pid': '101',
'header': '7E4',
'baudrate': 500000,
'formula': 'twos_comp(bytes_to_int(message.data[13:14])*256+bytes_to_int(message.data[14:15]),16)/10.0',
'protocol': '6',
'verify': False,
'force': True,
}
return __salt__['obd.query'](*args, **kwargs)['value']
# get soh
#
def get_soh():
args = ['soh']
kwargs = {
'mode': '220',
'pid': '105',
'header': '7E4',
'baudrate': 500000,
'formula': '(bytes_to_int(message.data[28:29])*256+bytes_to_int(message.data[29:30]))/10.0',
'protocol': '6',
'verify': False,
'force': True,
}
return __salt__['obd.query'](*args, **kwargs)['value']
# get external temp
#
def get_externaltemp():
args = ['externaltemp']
kwargs = {
'mode': '220',
'pid': '100',
'header': '7B3',
'baudrate': 500000,
'formula': '(bytes_to_int(message.data[9:10])/2.0)-40.0',
'protocol': '6',
'verify': False,
'force': True,
}
return __salt__['obd.query'](*args, **kwargs)['value']
# get battery temp
#
def get_batterytemp():
args = ['batterytemp']
kwargs = {
'mode': '220',
'pid': '101',
'header': '7E4',
'baudrate': 500000,
'formula': 'twos_comp(bytes_to_int(message.data[19:20]),8)',
'protocol': '6',
'verify': False,
'force': True,
}
return __salt__['obd.query'](*args, **kwargs)['value']
# get location
#
def get_location():
args = []
kwargs = {}
return __salt__['ec2x.gnss_nmea_gga'](*args, **kwargs)
Issues I’ve seen so far are -
- AttributeError: ‘module’ object has no attribute ‘time’
- OBD operations failing when they return zero. Sigh.
- I don’t think the car_model is quite correct
So I’m pretty sure this still needs work … but sharing all the same.
Note that the route planner folks are interested in doing this properly - I suppose this could be a plug-in on the cloud so its very easy for all to use.


